Autonomous Vehicles Should Start Small, Go Slow
Origin Article By Shaoshan Liu and Jean-Luc Gaudiot
许多年轻的都市人不想拥有汽车,与前几代人不同的是,他们不需要依赖公共交通。相反,他们将交通出行视为一种服务。当他们需要长途旅行时,比如说超过5英里(8公里),他们会用手机叫一辆Uber(或类似的共享单车公司的车)。如果他们的行程不到一英里左右,他们要么步行,要么使用各种 “微移动 “服务,比如越来越多的Lime和Bird踏板车,或者在一些城市,共享单车。
问题是,如今移动即服务生态系统往往不能很好地覆盖中间距离,比如说几英里的距离。雇佣Uber或Lyft来进行这种短途旅行,其费用令人沮丧,而且骑着踏板车或自行车超过一英里左右的路程对很多人来说可能会很费劲。因此,将自己送到1到5英里外的目的地可能是一个挑战。然而,这样的旅行占到了乘客总里程的一半左右。
这些中长途旅行中,很多都是在车流量有限的环境中进行的,比如大学校园和工业园区,在这些地方部署小型、低速的自主车辆,在经济上和技术上都是可行的。我们已经与一家初创公司合作,打算将这种交通方式普及化。这家名为PerceptIn的公司已经在日本奈良和福冈的旅游景点、中国深圳的工业园区、以及公司总部所在地–印地安那州的Fishers市,都有自主车辆在运营。
考虑到目前自主汽车的生产量仍然是多么的昂贵—一个实验车型的价格可能在30万美元左右—你可能不可能认为有可能以更低的价格卖出一辆自驾车汽车。我们过去几年的经验表明,事实上,今天生产出一辆自驾车乘用车是有可能的。PerceptIn的车辆目前的售价约为7万美元,未来价格肯定会下降。以下是我们和PerceptIn的同事们如何将自主驾驶汽车的成本降下来的。
高成本无人车标准技术方案
首先,我们先来解释一下为什么自主驾驶汽车通常会这么贵。一言以蔽之,就是因为它们所携带的传感器和计算机非常昂贵。
自主驾驶所需的传感器套件通常包括一个高端卫星导航接收器、激光雷达(光线探测和测距)、一个或多个摄像头、雷达和声纳。该车还需要至少有一台非常强大的计算机。
这种情况下使用的卫星导航接收器与手机中的卫星导航接收器不一样。内置在自主车辆上的那种卫星导航接收器具有所谓的实时运动学(RTK)功能,可进行高精度的位置固定,精确度可达10厘米。这些设备的价格通常在4000美元左右。即便如此,这种卫星导航接收机也不能完全依靠它来告诉汽车的位置。在卫星信号从附近的建筑物上反弹的情况下,它所得到的固定信号可能会产生噪音和延迟。在任何情况下,卫星导航都需要无遮挡的天空视野。在封闭的环境比如隧道内,卫星导航无疑直接失效。
幸运的是,自动驾驶汽车还有其他方法来确定自己的位置。特别是,它们可以使用激光雷达,通过将激光束反弹到物体上并测量光线反射回来所需的时间来确定与物体的距离。一个典型的自主车辆用激光雷达装置的探测范围为150米,每秒采样超过100万个空间点。
这样的激光雷达扫描可用于识别当地环境中的不同形状。然后,车辆的计算机将所观察到的形状与该地区的高清数字地图中记录的形状进行比较,使其能够随时跟踪车辆的准确位置。激光雷达还可用于识别和避开瞬时障碍物,如行人和其他车辆等。
Lidar是一项很棒的技术,但它有两个问题。首先,这些设备的价格非常昂贵。一台用于自主驾驶的高端激光雷达的价格很容易超过8万美元,虽然成本在下降,但对于低速应用来说,4000美元左右就能买到一台合适的设备。另外,激光雷达作为一种光学设备,在大雨或大雾等恶劣天气下,可能无法提供合理的测量结果。
这些车辆上的摄像头也是如此,主要用于识别和跟踪不同的物体,如车道、红绿灯、行人等边界。通常情况下,在车辆周围安装了多个摄像头。这些摄像头通常以每秒60帧的速度运行,所使用的多个摄像头每秒可以产生超过1千兆字节的原始数据。当然,处理这些海量的信息,对车辆的计算机提出了非常大的计算需求。好的一面是,摄像头的价格并不昂贵。
自主汽车上的雷达和声纳系统被用于避障。它们产生的数据集显示了车辆路径上最近的物体的距离。这些系统的主要优点是可以在各种天气条件下工作。声纳通常覆盖的范围最多10米,而雷达的范围通常可达200米。与摄像机一样,这些传感器的价格相对便宜,通常每个传感器的价格不到1000美元。
这类传感器提供的许多测量结果会被输入到车辆的计算机中,计算机必须将所有这些信息整合在一起,以产生对环境的理解。人工神经网络和深度学习,这种近年来发展迅速的方法在这里发挥了很大的作用。通过这些技术,计算机可以跟踪附近行驶的其他车辆,以及过马路的行人,确保自主车辆不会与任何东西或任何人发生碰撞。
当然,指挥自主车辆的计算机要做的事情还不止是避免撞到东西。它们必须做出大量的决策,决定转向的方向和速度。为此,车辆的计算机会对附近车辆的即将到来的移动情况进行预测,然后根据这些预测以及乘员需要去哪里,再决定行动方案。
最后,自动驾驶汽车需要一张好的地图。传统的数字地图通常是由卫星图像生成的,精确度为米级。虽然这对于人类驾驶者来说已经绰绰有余,但自主汽车对车道级信息的精度要求更高。因此,需要特殊的高清地图。
就像传统的数字地图一样,这些高清地图包含了很多层信息。最底层是地图的网格单元格,约5×5厘米;它是由专用汽车收集的原始激光雷达数据生成的。这个网格记录了环境中物体的高程和反射信息。
在这个基础网格之上,还有几层附加信息。例如,车道信息被添加到网格地图上,以便自主车辆判断是否在正确的车道上。在车道信息的基础上,还添加了交通标志标签,以通知自主车辆当地的限速、是否接近红绿灯等。这在车辆上的摄像头无法读取交通标志的情况下,有一定的帮助。
传统的数字地图是每6到12个月更新一次。为了确保自主车辆使用的地图包含最新信息,高清地图应该每周刷新一次。因此,对于一个中等规模的城市来说,生成和维护高清地图每年的成本可能高达数百万美元。
这些高清地图上的所有数据都必须存储在车辆上的固态存储器中,以便随时访问,这就增加了计算硬件的成本,而计算硬件需要相当强大。举个例子,百度在自主驾驶中采用的一个早期计算系统,使用的是英特尔Xeon E5处理器和4到8个Nvidia K80 GPU加速器。该系统每秒能够提供64.5万亿次浮点运算,但它的功耗约为3000瓦,并产生了大量的热量。而它的成本约为3万美元。
PerceptIn低速无人车低成本方案
考虑到光是传感器和计算机的成本就很容易超过10万美元,这就不难理解为什么自主汽车的价格如此昂贵了,至少在今天是这样。当然,随着生产总量的增加,价格会有所下降。但目前还不清楚创建和维护高清地图的成本将如何转嫁。无论如何,在正常道路和高速公路上自主驾驶所带来的所有明显的安全问题都需要时间来解决,而更好的技术还需要时间来解决。
我们和PerceptIn的同事们一直在努力解决这些挑战,他们将注意力集中在那些在有限的区域内运行且不需要与高速交通混合的小型、低速车辆上–例如大学校园和工业园区。
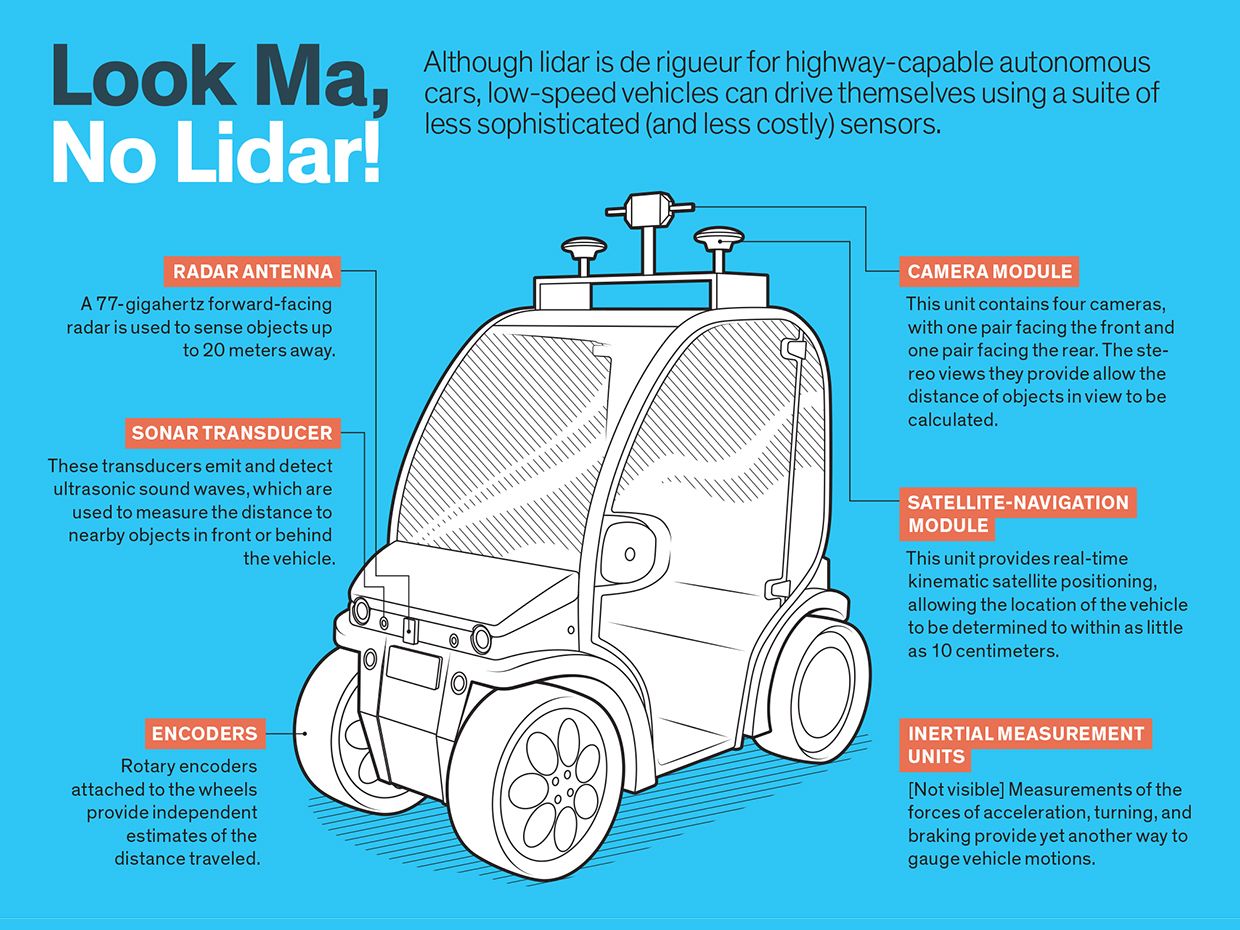
我们用来降低成本的主要策略是完全抛弃激光雷达,转而使用更经济实惠的传感器:摄像头、惯性测量单元、卫星定位接收器、车轮编码器、雷达和声纳。这些传感器所提供的数据可以通过一个叫做传感器融合的过程进行组合。
这些传感器的缺点和优点都是相辅相成的。当其中一个传感器出现故障或故障时,其他传感器可以接替,以确保系统的可靠性。采用这种传感器融合的方式,传感器的成本最终可能会下降到2000美元左右。
因为我们的汽车以低速行驶,最多只需要7米就能停下来,这使得它比普通的汽车要安全得多,因为普通的汽车可能需要几十米才能停下来。而且由于速度较低,计算系统的延迟要求也没有高速自主汽车上使用的系统那么苛刻。
PerceptIn的车辆使用卫星定位进行初始定位。这些卫星导航接收机虽然不如高速公路上的自主汽车上的系统准确,但仍能提供亚米级的精度。通过将摄像头图像和惯性测量单元的数据结合在一起(在一种称为视觉惯性里程法的技术中),车辆的计算机进一步提高了精度,将位置固定到分米级。
在成像方面,PerceptIn在一个硬件模块中集成了四个摄像头。一对摄像头面向车头,另一对面向车尾。每一对摄像头都能提供双目视力,能够捕捉到通常由激光雷达提供的空间信息。更重要的是,这四个摄像头合在一起可以捕捉到360度的环境视图,帧与帧之间有足够多的空间重叠区域,确保视觉测距仪可以在任何方向上工作。
即使视觉测距仪出现故障,卫星定位信号中断,也不会丢失。该车仍然可以使用连接在车轮上的旋转编码器计算出位置更新—-遵循水手们几个世纪以来使用的一般策略,即死计算。
将所有这些传感器的数据集结合起来,让车辆对环境有一个整体的了解。基于这种了解,车辆的计算机可以做出所需的决策,以确保顺利安全行驶。
此外,车辆还有一个独立于主电脑之外的防撞系统,为车辆提供了最后一道防线。这套系统利用毫米波雷达和声纳的组合,当车辆靠近物体5米以内时,就会感应到,在这种情况下,车辆会立即停止行驶。
依靠成本较低的传感器只是PerceptIn为降低成本而采取的策略之一。另一个策略是将计算推到传感器上,以减少对车辆主电脑的要求,一台普通的PC机总成本不到1500美元,系统峰值功率只有400W。
以PerceptIn的摄像头模块为例,每秒可以产生400兆字节的图像信息。如果将这些数据全部传输到主计算机上进行处理,那么该计算机就必须非常复杂,这将在可靠性、功率和成本方面产生重大影响。相反,PerceptIn让每个传感器模块尽可能多地进行计算。这就减少了主计算机的负担,简化了设计。
更具体地说,GPU被嵌入到摄像头模块中,从原始图像中提取特征。然后,只将提取的特征发送到主计算机,将数据传输率降低一千倍。
另一种限制成本的方法涉及到高清地图的创建和维护。PerceptIn不使用装有激光雷达装置的车辆来提供地图数据,而是用视觉信息增强现有的数字地图,以达到分米级精度。
由此产生的高精度可视地图,就像它们所取代的基于激光雷达的高清地图一样,由多个图层组成。底层可以是任何现有的数字地图,例如来自OpenStreetMap项目的数字地图。这个底层的分辨率约为1米。第二层记录了路面的视觉特征,将地图分辨率提高到分米级。第三层同样以分米分辨率保存,记录了环境中其他部分的视觉特征,如标志、建筑物、树木、围墙和灯杆等。第四层是语义层,它包含了车道标记、交通标志标签等。
总结
虽然在过去的十年里已经取得了很大的进展,但要想让完全自主的汽车开始在大多数道路和高速公路上行驶,可能还需要十年或更长时间。在此期间,一个实用的方法是在限制性的环境下使用低速自主汽车。包括Navya、EasyMile和May Mobility在内的几家公司,以及PerceptIn等公司一直在认真地研究这一战略,并取得了良好的进展。
最终,随着相关技术的进步,车辆的类型和部署范围可以扩大,最终可以包括能够与人类专家级驾驶员的性能相当甚至超过人类专家级驾驶员的车辆。
PerceptIn已经表明,制造小型、低速自主汽车的成本远远低于制造一辆能上高速公路的自主汽车的成本。当车辆大量生产时,我们预计制造成本将低于1万美元。在不远的将来,这样的清洁能源自主班车或许有可能在城市中心地带载客,比如曼哈顿的中央商务区,现在这里的平均车速只有7英里/小时。这样的车队将大大降低乘客的成本,改善交通状况,提高安全性,并改善空气质量。在世界高速公路上解决自主驾驶的问题可以在以后进行。
关于作者
Shaoshan Liu is the cofounder and CEO of PerceptIn, an autonomous vehicle startup in Fishers, Ind.
Jean-Luc Gaudiot is a professor of electrical engineering and computer science at the University of California, Irvine.